1. Introduction
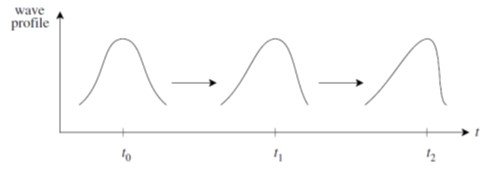
In the jargon of hydrodynamic transport phenomena, a ‘shock’ is a discontinuity separating two different regions in an otherwise continuous medium (Kallenrode, 2004). It is associated with a disturbance moving faster than the rate of signal propagation in the environment, such as an airplane traveling at a speed greater than the speed of sound. Shocks arise by means of a wave steepening mechanism (Figure 1) in which a rapidly speeding agent generates compression waves and eventually outstrips the wave fronts themselves, generating a sudden, non-adiabatic change of state.
Figure 1. Illustration of wave-front steepening in propagation of a compression wave.
In ordinary gas dynamics, the shock is a transition associated with supersonic flow behind the shock and subsonic flow in front of it. Given the upstream state of the flow, a question arises: what are the thermomechanical variables, such as velocity, density, pressure, temperature and entropy, on the downstream, subsonic, side of the shock? In neutral gas dynamics, this question is answered by the Rankine-Hugoniot relations, and the behavior of the transition is straightforwardly characterized the sound speed, c. In MHD shocks, there are three characteristic velocities, as we will find out shortly, which renders the analysis more complex and nuanced than in models of hydrodynamic shocks.
While the study of non-conducting (i.e., unmagnetized and electrically neutral) shocks has occupied researchers since the days of pioneers such as Hugoniot and Prandtl in the late 19th/early 20th centuries, research on magnetohydrodynamic shocks is more recent. Experimental work with plasmas began in the late 1920s and accelerated in the early post-war era; starting in the 1950s, research on magnetohydrodynamic shocks blossomed as a byproduct of advanced countries’ growing interest in fusion power and universities’ rapidly expanding space research programs. Two classic papers on MHD shocks are Herlofson (1950) and de Hoffmann and Teller (1950).
2. De Hoffmann-Teller frame
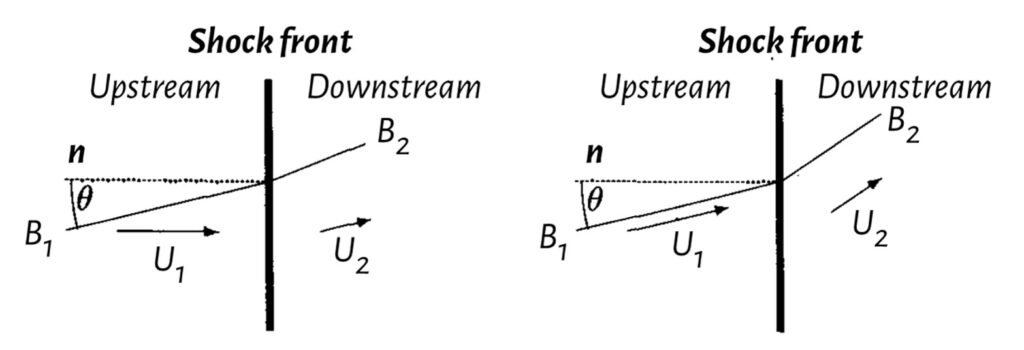
Needless to say, the crucial difference between a MHD shock and an ordinary shock is the magnetic field. When casting the conservation equations for a MHD shock, plasma scientists often make use of the de Hoffmann-Teller frame, Figure 2. In the normal incidence frame, the upstream plasma flow is normal to the shock and oblique to the magnetic field. The downstream flow is oblique to both the magnetic field and shock normal. In the de Hoffmann-Teller frame, the plasma flow is parallel to the magnetic field on both sides of the shock and the U 
Figure 2. Frames of reference for MHD shocks: normal incidence frame (left) and de Hoffmann-Teller frame (right).
3. Jump conditions and shock adiabatic
The conservation laws that relate the thermomechanical variables upstream and downstream of a discontinuity are known as jump conditions. The jump conditions associated with an MHD shock derive (1) from ideal MHD equations for mass, momentum, and energy conservation; and (2) from the requirement, afforded by Maxwell’s equations, that the tangential component of the electric field and the normal component of the magnetic field must be continuous across the discontinuity. We may write down a variation in some thermomechanical variable 

Accordingly, we have:
Conservation of mass

Conservation of momentum flux 1

Conservation of momentum flux 2

Conservation of energy

Continuity of tangential component of electric field (recall that 


Continuity of normal component of magnetic field

In these relations, 


As the reader will surely have noticed, we had nothing to say about the entropy of this system. For brevity, we simply note that entropy increases across a MHD shock, and that this increase is indicative of irreversible dissipative processes across the shock. Chapter 16 in Somov (2012) covers the entropy issue in much greater detail.
The formulation of the MHD shock problem characterized by equations (2)–(7) has one more variable than equations, hence we must introduce a new parameter to make the system tractable. Following Gurnett and Bhattacharjee (2017), we introduce the shock strength or compression ratio r, which is the ratio of the downstream to the upstream plasma densities,

This leads to closure of the problem. We also introduce two more indispensable dimensionless quantities, namely

and

Parameter MA is the Alfvén Mach number, defined as the ratio of the normal component of flow velocity to the normal component of the Alfvén velocity. In turn, parameter MS is the sonic Mach number, defined as the ratio of the normal component of flow velocity to the sound speed. (We won’t use these Mach numbers directly, but they are crucial in other aspects of MHD shock theory and the reader interested in MHD shocks should be aware of their importance in hydromagnetic transport phenomena.) One last parameter essential to our analysis is the angle 

Equipped with these quantities, we may write down the shock adiabatic for a plasma with heat capacity ratio 
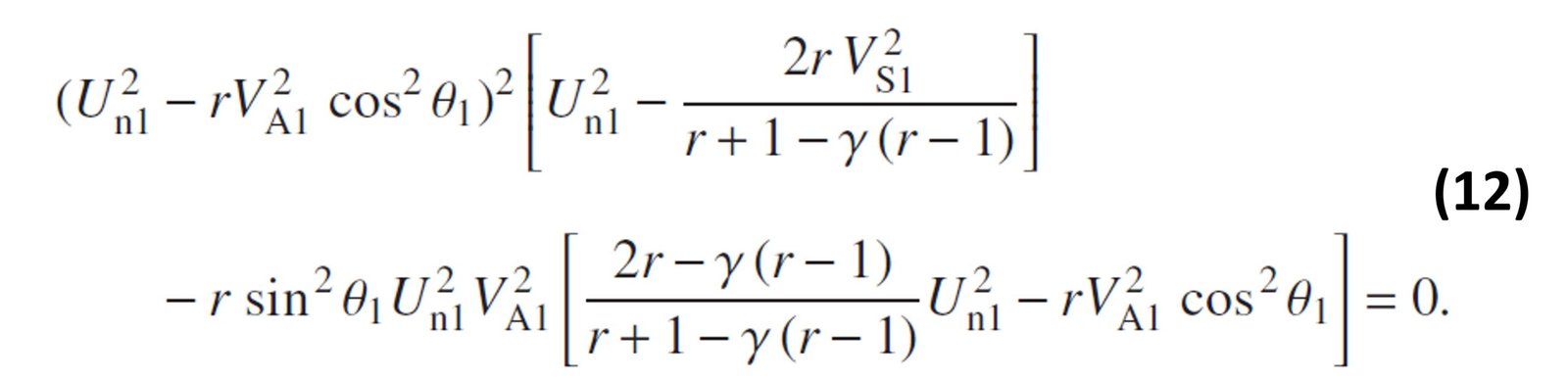
This equation, albeit long, is merely an expression for the propagation speed of the shock as a function of other upstream variables (designated with a subscript ‘1’) and plasma parameters (compression ratio r and heat capacity ratio 
Figure 3. Changes in magnetic field direction (arrow) from ahead (upstream) to behind (downstream) an MHD shock.
![]()
4. Special cases
4.1. Weak shock limit
In the weak shock limit, the density of the plasma upstream and downstream of the shock is equal, so the shock strength is r = 1. In this case, the shock adiabatic takes the form
![\displaystyle \left( {U_{{n1}}^{2}-V_{{A1}}^{2}{{{\cos }}^{2}}{{\theta }_{1}}} \right)\left[ {U_{{n1}}^{4}-U_{{n1}}^{2}\left( {V_{{A1}}^{2}+V_{{S1}}^{2}} \right)+V_{{S1}}^{2}V_{{A1}}^{2}} \right]=0\,\,\,\,\,\mathbf{(13)}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cleft%28+%7BU_%7B%7Bn1%7D%7D%5E%7B2%7D-V_%7B%7BA1%7D%7D%5E%7B2%7D%7B%7B%7B%5Ccos+%7D%7D%5E%7B2%7D%7D%7B%7B%5Ctheta+%7D_%7B1%7D%7D%7D+%5Cright%29%5Cleft%5B+%7BU_%7B%7Bn1%7D%7D%5E%7B4%7D-U_%7B%7Bn1%7D%7D%5E%7B2%7D%5Cleft%28+%7BV_%7B%7BA1%7D%7D%5E%7B2%7D%2BV_%7B%7BS1%7D%7D%5E%7B2%7D%7D+%5Cright%29%2BV_%7B%7BS1%7D%7D%5E%7B2%7DV_%7B%7BA1%7D%7D%5E%7B2%7D%7D+%5Cright%5D%3D0%5C%2C%5C%2C%5C%2C%5C%2C%5C%2C%5Cmathbf%7B%2813%29%7D&bg=ffffff&fg=000&s=1&c=20201002)
which is found to be identical to the dispersion relation for small-amplitude waves in an MHD fluid, except that in our results the shock speed Un1 substitutes the phase speed. MHD shocks usually travel faster than the linear MHD modes. However, as the compression ratio of downstream to upstream density approaches unity, the fast, intermediate, and slow shocks reduce to the corresponding linear waves and propagate at their phase velocities.
4.2. Parallel shock limit
Inspecting the shock adiabatic (12), it is readily seen that the solution is greatly simplified when 


and

In the limit r 
Since

No solution exists for r > rm.
In contrast to the first solution, the second one is substantially affected by the magnetic field. This solution describes the intermediate shock that can be parallel to the normal on the upstream side of the shock, but still have a tangential component on the downstream side. Because of the abrupt appearance of a tangential component to the magnetic field, this shock is sometimes called a switch-on shock.
4.3. Perpendicular shock limit
For a perpendicular shock,
![\displaystyle U_{{n1}}^{2}=\frac{{2r\left[ {V_{{S1}}^{2}+\left( {r-\frac{{\gamma \left( {r-1} \right)}}{2}} \right)V_{{A1}}^{2}} \right]}}{{\left( {\gamma -1} \right)\left( {{{r}_{m}}-1} \right)}}\,\,\,\,\,\left( {\mathbf{17}} \right)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+U_%7B%7Bn1%7D%7D%5E%7B2%7D%3D%5Cfrac%7B%7B2r%5Cleft%5B+%7BV_%7B%7BS1%7D%7D%5E%7B2%7D%2B%5Cleft%28+%7Br-%5Cfrac%7B%7B%5Cgamma+%5Cleft%28+%7Br-1%7D+%5Cright%29%7D%7D%7B2%7D%7D+%5Cright%29V_%7B%7BA1%7D%7D%5E%7B2%7D%7D+%5Cright%5D%7D%7D%7B%7B%5Cleft%28+%7B%5Cgamma+-1%7D+%5Cright%29%5Cleft%28+%7B%7B%7Br%7D_%7Bm%7D%7D-1%7D+%5Cright%29%7D%7D%5C%2C%5C%2C%5C%2C%5C%2C%5C%2C%5Cleft%28+%7B%5Cmathbf%7B17%7D%7D+%5Cright%29&bg=ffffff&fg=000&s=1&c=20201002)
In the weak shock limit (r = 1) this solution corresponds to the fast magnetosonic mode. Note that the propagation speed of this shock depends on both the sound speed and the Alfvén speed VA1. The reason for this mixed dependence is that the plasma and the magnetic field are both compressed as the plasma flows across the shock. Since there is no field line stretching for a perpendicular shock, the frozen-field theorem ensures that increased pressure (i.e., compression) is accompanied by gradients in both the plasma’s density, which affects the speed of sound, and magnetic induction, which determines the Alfvén speed.
Inspecting equation (16), we see that the propagation speed of a perpendicular shock goes to infinity as the denominator goes to zero, similarly to what occurs in a parallel shock. A perpendicular shock has exactly the same upper limit rm (eq. (14)) that holds for a parallel shock; indeed, it can be shown that this upper limit applies to any orientation of the upstream magnetic field (Gurnett and Bhattacharjee, 2017).
4.4. Strong shock limit
Since both parallel and perpendicular shocks have an upper limit to the shock strength, it is worthwhile to establish the general solution for the shock adiabatic as r approaches the limiting value rm. Expanding the shock adiabatic equation (12) in powers of Un1 and solving the ensuing equation gives the following solution for
![\displaystyle U_{{n1}}^{2}=\frac{{2r\left[ {V_{{S1}}^{2}+{{{\sin }}^{2}}{{\theta }_{1}}V_{{A1}}^{2}\left( {r-\frac{{\gamma \left( {r-1} \right)}}{2}} \right)} \right]}}{{\left( {\gamma -1} \right)\left( {{{r}_{m}}-r} \right)}}\,\,\,\,\,\mathbf{(18)}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+U_%7B%7Bn1%7D%7D%5E%7B2%7D%3D%5Cfrac%7B%7B2r%5Cleft%5B+%7BV_%7B%7BS1%7D%7D%5E%7B2%7D%2B%7B%7B%7B%5Csin+%7D%7D%5E%7B2%7D%7D%7B%7B%5Ctheta+%7D_%7B1%7D%7DV_%7B%7BA1%7D%7D%5E%7B2%7D%5Cleft%28+%7Br-%5Cfrac%7B%7B%5Cgamma+%5Cleft%28+%7Br-1%7D+%5Cright%29%7D%7D%7B2%7D%7D+%5Cright%29%7D+%5Cright%5D%7D%7D%7B%7B%5Cleft%28+%7B%5Cgamma+-1%7D+%5Cright%29%5Cleft%28+%7B%7B%7Br%7D_%7Bm%7D%7D-r%7D+%5Cright%29%7D%7D%5C%2C%5C%2C%5C%2C%5C%2C%5C%2C%5Cmathbf%7B%2818%29%7D&bg=ffffff&fg=000&s=1&c=20201002)
There are three roots for , one of which is given by (18). The remaining two roots for the strong shock limit can be obtained by solving the quartic equation

The above equation is a quadratic in

which is necessarily negative because rm is always greater than 1 and all factors are taken to even powers. Thus, the remaining two roots, which correspond to slow and intermediate shocks, merge and become complex (i.e., nonpropagating) at some intermediate shock strength rc. It follows that rm represents an absolute upper limit to the shock strength for all three types of shocks.
Summarizing the above discussion, we can state the following regarding shock strengths and magnetic field orientations:
- The shock adiabatic has three roots, called the slow, intermediate, and fast shocks.
- In the weak shock limit, r
1, the propagation speeds of the three shocks correspond to the slow magnetosonic wave, the transverse Alfvén wave, and the fast magnetosonic wave.
- As the shock strength increases, the speeds of the slow and intermediate shocks merge at an intermediate value of the shock strength, which we’ve denoted as rc. For any larger value of r, these shocks no longer exist. Thus, there is an upper limit, rc, to the strengths of the slow and intermediate shocks.
- For shock strengths greater rc, only one solution exists (the fast shock), and the speed of this shock asymptotically approaches infinity as 1/(rm – r)1/2, where rm is given by (16). No solution exists for shock strengths greater than rm.
In view of these results, we can conclude that a plot of the shock speed 


Figure 4. Shock strength versus shock speed.

References
The references list will be posted soon!