


Since blood vessels bifurcate multiple times before becoming capillaries, investigating an optimal pattern of bifurcation becomes an attractive task. Analyses of this sort have been undertaken for centuries; two contributions of seminal importance are the 1808 Croonian Lecture by Thomas Young and a 1926 paper by C. D. Murray that went largely unnoticed for decades. The discussion in this article closely follows the textbook of legendary biomechanicist Y. C. Fung, who passed away in December 2019, precisely two months after his 100th birthday. His Biomechanics: Circulation was published in the 1990s and remains the definitive textbook on biofluid mechanics.
1. Analysis of an Arterial Bifurcation
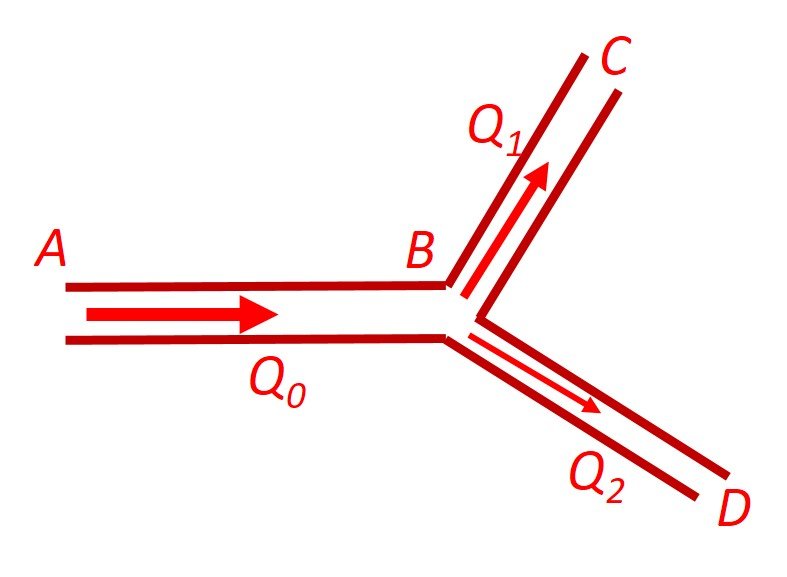
In our arterial bifurcation model, we propose a system of three cylindrical vessels, a main vessel AB and two daughter vessels BC and BD, as shown in Figure 1. A steady blood flow 


Figure 1. Arterial bifurcation model.
To provide a mathematical theory of bifurcations involving blood vessels, Murray suggested that the inner radius a of a blood vessel arises as an outcome of a “compromise” between the advantage of increasing the lumen, which decreases the resistance to flow, and the disadvantage of increasing overall blood volume, which increases the metabolic demand to maintain the blood. With this in mind, he proposed a cost function constituted of two terms. The first term is the rate at which work is done on the blood, which is given by the product of flow rate and pressure drop, 


Replacing Q with Poiseuille’s law yields

For a given vessel of flow Q and length L, there must be some optimal radius, which can be obtained by differentiating the cost function, setting it to zero, and solving for a; that is,



Clearly, the optimal radius of a blood vessel is proportional to blood flow to the 1/3 power. Substituting the result above into the cost function yields the minimum value of f,

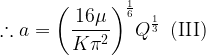
We can now turn to the design of the bifurcation pattern. The vessels are assigned radii and lengths as shown in Figure 2. The cost function of the entire system of blood vessels is the sum of the cost functions of individual vessel segments. Since the cost functions of all vessels are additive, we see at once that the vessels connecting A, C, and D in Figure 1 should be straight and lie in a plane (as this minimizes the length, L, when other things are fixed). The total cost function, which we denote by F, is then

Figure 2. Arterial bifurcation geometry.
The lengths L0, L1, and L2 are affected by the location of the point B – which, as the reader should recall, is the one point in the bifurcation that we are allowed to displace – and the radii a0, a1, and a2 are related to the flows Q0, Q1, and Q2 by equation (III). We proceed to minimize F by properly choosing the location of the bifurcation point B.
A small movement of B changes F by an amount F such that

An optimal location of B would make 

so that, substituting into equation (VI), we obtain

The optimum is obtained when

Next, let B move to B’ in the direction of CB, as shown in Figure 3.2. In this case,

so that
![\displaystyle \delta P=\frac{{3\pi K\delta }}{2}\left[ {-a_{0}^{2}\cos \theta +a_{1}^{2}+a_{2}^{2}\cos \left( {\theta +\phi } \right)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cdelta+P%3D%5Cfrac%7B%7B3%5Cpi+K%5Cdelta+%7D%7D%7B2%7D%5Cleft%5B+%7B-a_%7B0%7D%5E%7B2%7D%5Ccos+%5Ctheta+%2Ba_%7B1%7D%5E%7B2%7D%2Ba_%7B2%7D%5E%7B2%7D%5Ccos+%5Cleft%28+%7B%5Ctheta+%2B%5Cphi+%7D+%5Cright%29%7D+%5Cright%5D&bg=ffffff&fg=000&s=1&c=20201002)
The optimum condition is then

Finally, let B move a short distance

Figures 3.1-3. Small bifurcation displacements.
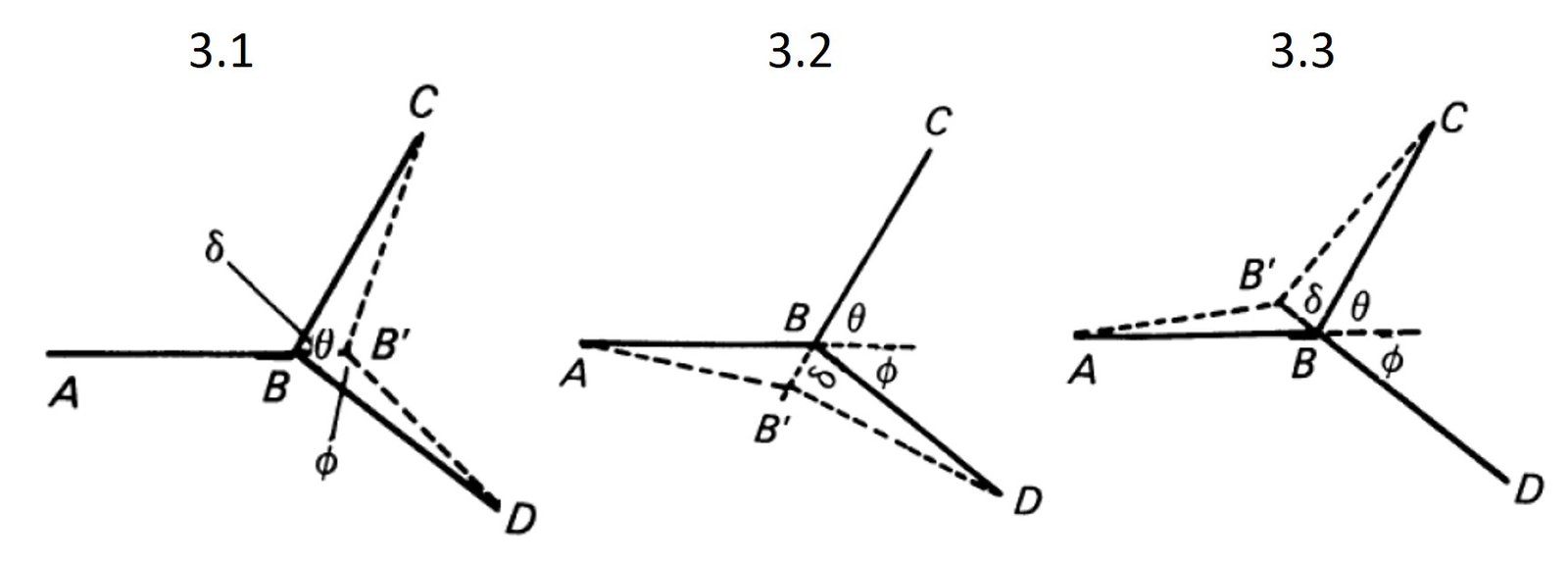
Gleaning equations (VII), (VIII), and (IX), we have



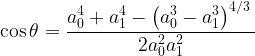
These equations can be solved for the cosines by means of the Mathematica code

That is,

From conservation of mass, we can write

which, combined with equation (III), yields

This result is known as Murray’s law. We can isolate a2 and write

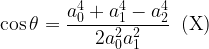
Then, we substitute a2 into equation (X) to give

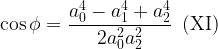
The cosine of one of the angles outlined by the bifurcation has been expressed in terms of two vessel radii only. The same can be done for cos 

and finally for cos(

Using these expressions, we can draw some interesting conclusions regarding the geometry of the bifurcation under special circumstances.
2. If the radii of the daughter branches are equal, the bifurcating angles are equal
To show this, let a1 = a2. Substituting into equation (XIV) brings to

The rightmost side of this result happens to have the same form as equation (XV). Thus,

which means that

Simply put, if the radii of the daughter branches are equal, the bifurcation angles will be equal.
3. If a2 

At this point, we assume that the radius of one daughter vessel is much larger than the other. We can rewrite equation (XVI) as

If one radius is indeed much greater than the other, we must have 





Then, from elementary trigonometry,

Similarly, consider the equation obtained for cos
Here, 



or 90o. Finally, noting that


These results show that, when the radius of one of the daughter vessels is much greater than that of the other, the bifurcation approaches a T shape.
4. When a1 = a2, it follows that a1/a0 = 2-1/3 = 0.794 and cos
Here, we posit that the two daughter vessels have the same radius. Substituting a1 = a2 into equation (XVI) brings to




However, we established in Part 2 that


and, consequently,
Let a0 denote the radius of the aorta, and assume equal bifurcation in all generations. Thus, the radius of the first generation is 0.794a0, the radius of the second generation is 0.7942a0, and, in general terms, that of the n-th generation is given by

Substituting an = 5

This equation can be solved using logarithms to yield n = 34.7
In the early 19th century, Thomas Young took arbitrary dimensions for the aorta and capillaries and proposed a model for the successive ramifications of blood vessels. Young chose a symmetrical, dichotomous system in which the diameter of each branch was “about 4/5 of that of the trunk, or more accurately 1:21/3.“ By assuming this geometric ratio between the diameters of daughter and parent vessels, Young calculated that 29 bifurcations were necessary to diminish the aorta to the size of the capillaries. This estimate is not too much far off from ours. From estimates of the lengths of the aorta and the capillaries, Young constructed a geometric series for lengths of the approximately thirty generations of vessels and went on to calculate blood volumes, velocities of flow, and resistances in the different stages of the system. Young does not say why he chose a ratio of 21/3:1, but it seems certain that he was familiar with a rule – either empirical or theoretical – that favored his choice.
References
• FUNG, Y. (1997). Biomechanics: Circulation. 2nd edition. Berlin/Heidelberg: Springer.
• HUMPHREY, J. and DELANGE, S. (2004). An Introduction to Biomechanics. Berlin/Heidelberg: Springer.
• VOGEL, S. (1992). Vital Circuits. Oxford: Oxford University Press.

